Haptiknit: A new wearable technology

Wearable haptic devices, designed to deliver touch-based feedback, enhance immersion in virtual reality, support rehabilitation efforts, and enable silent communication. However, most existing devices rely on vibration, as pressure-based solutions typically necessitate cumbersome exoskeletons or rigid structures.
Aiming to overcome these limitations, researchers at Stanford Engineering have introduced Haptiknit—a soft, flexible knit sleeve that delivers realistic pressure-based haptic feedback. Published on December 18 in Science Robotics, their innovation demonstrates that pressure-based haptics can outperform vibration in specific applications, paving the way for a new generation of haptic technologies.
Their design demonstrates that pressure may be more effective than vibration in some applications, and it marks the first step toward a new category of haptic devices. It is much more lightweight, wearable, and comfortable. / Allison Okamura, Study Senior Author and Richard W. Weiland Professor, Stanford University
Okamura and her team developed a battery-powered pneumatic system featuring pressure actuators—compact inflatable pouches that rapidly fill with air. To address the challenge of securing these pouches against the skin without the need for a bulky exoskeleton, they devised an innovative solution.
If you put air into a balloon next to your skin but don’t anchor it there, it’s going to expand in all directions. You are going to waste most of the inflation potential. / Cosima du Pasquier, Study First Author and Postdoctoral Researcher, Stanford University
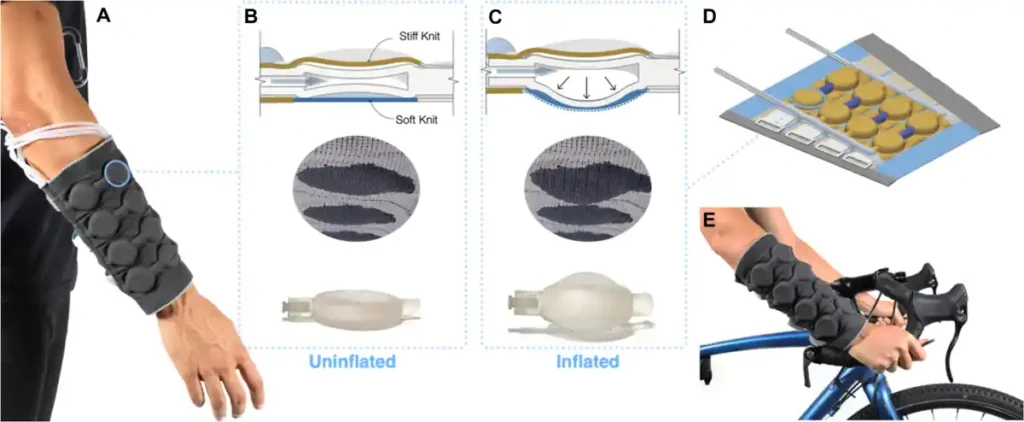
Du Pasquier, an avid clothing enthusiast, identified knit fabric as the key to solving the challenge. The research team designed a specialized textile that combines stiffness in specific areas to securely position the pressure actuators against the skin, with flexibility elsewhere to ensure comfort and freedom of movement.
The team partnered with the MIT Self-Assembly Lab to create the Haptiknit prototype using a knitting machine. The design accommodated eight actuators arranged in two rows. Crafted primarily from nylon and cotton, the sleeve also incorporated thermoplastic fibers in the areas backing the actuators. After knitting, the researchers applied heat to melt the thermoplastic fibers, hardening those sections to provide the necessary stiffness while maintaining flexibility in the rest of the fabric.
“A challenge in the field of soft robotics is how do you stick together something hard and something soft – they tend to delaminate. But putting these fibers into knitting makes a totally seamless transition from parts that are hard to parts that are soft because it is one continuous fabric,” Okamura added.
The researchers evaluated the Haptiknit prototype with 32 participants and discovered that users could more accurately identify the location of individual touches from the pressure actuators compared to a similarly arranged vibrational device. They also experimented with varying the inflation speed of actuators in sequence to simulate the sensation of a continuous stroke, rather than discrete touches—or the unsettling feeling of a spider crawling on the arm. Participants reported that faster, overlapping indentations effectively mimicked the sensation of a smooth stroke, in contrast to vibration.
In another test, participants were tasked with recognizing six emotions—attention, gratitude, happiness, calming, love, and sadness—conveyed through pressure-based signals. Drawing on touch patterns established in earlier studies, participants correctly identified the emotions at rates above chance, though some confusion arose, particularly between the gestures for “calming” and “love.”
Overall, participants rated the sensations from Haptiknit as equally or more pleasant than those produced by vibrations. They also found the prototype sleeve comfortable and user-friendly, highlighting its potential for long-term applications in various settings.
“What was particularly interesting was that there was a correlation between whether someone had tried a haptic device before and how highly they rated the comfort of our sleeve. Essentially, if they had tried out other haptic devices, they scored our sleeves much higher,” du Pasquier added.
With lighter and more comfortable haptic devices, the researchers envision innovative ways to communicate through touch. Du Pasquier suggested that Haptiknit could find applications in navigation, military communication, and even dog training.
Okamura, du Pasquier, and their team are refining their knitting patterns and exploring the development of larger-scale devices, including the possibility of a full suit for enhanced virtual reality experiences. They also aim to integrate their technology into assistive devices designed to support movement and rehabilitation.
Okamura concluded, “We can use this to start testing how people actually interpret and respond to this type of haptic information. Whether the purpose is entertainment, communication, training, or physical assistance, this really brings these wearable devices toward things that people might actually want to use in their everyday lives.”
The research was published in the journal Science Robotics.