Drone inspirado em aves pode saltar para decolar.

“A expressão ‘como o corvo voa’ é um ditado comum que se refere à distância mais curta entre dois pontos, mas o Laboratório de Sistemas Inteligentes (LIS), liderado por Dario Floreano, da Escola de Engenharia da EPFL, levou a frase literalmente com o RAVEN (Veículo Robótico Inspirado em Aves para Múltiplos Ambientes). Projetado com base em aves que pousam, como corvos e gralhas, que frequentemente alternam entre o ar e a terra, as pernas robóticas multifuncionais permitem que ele decole autonomamente em ambientes antes inacessíveis para drones com asas.
“As aves foram a inspiração para os aviões em primeiro lugar, e os irmãos Wright tornaram esse sonho realidade, mas até os aviões de hoje ainda estão bastante distantes do que as aves são capazes de fazer”, diz o doutorando do LIS, Won Dong Shin. “As aves podem transitar de caminhar para correr até o ar e voltar, sem a necessidade de uma pista de decolagem ou lançador. Plataformas de engenharia para esses tipos de movimento ainda estão faltando na robótica.”
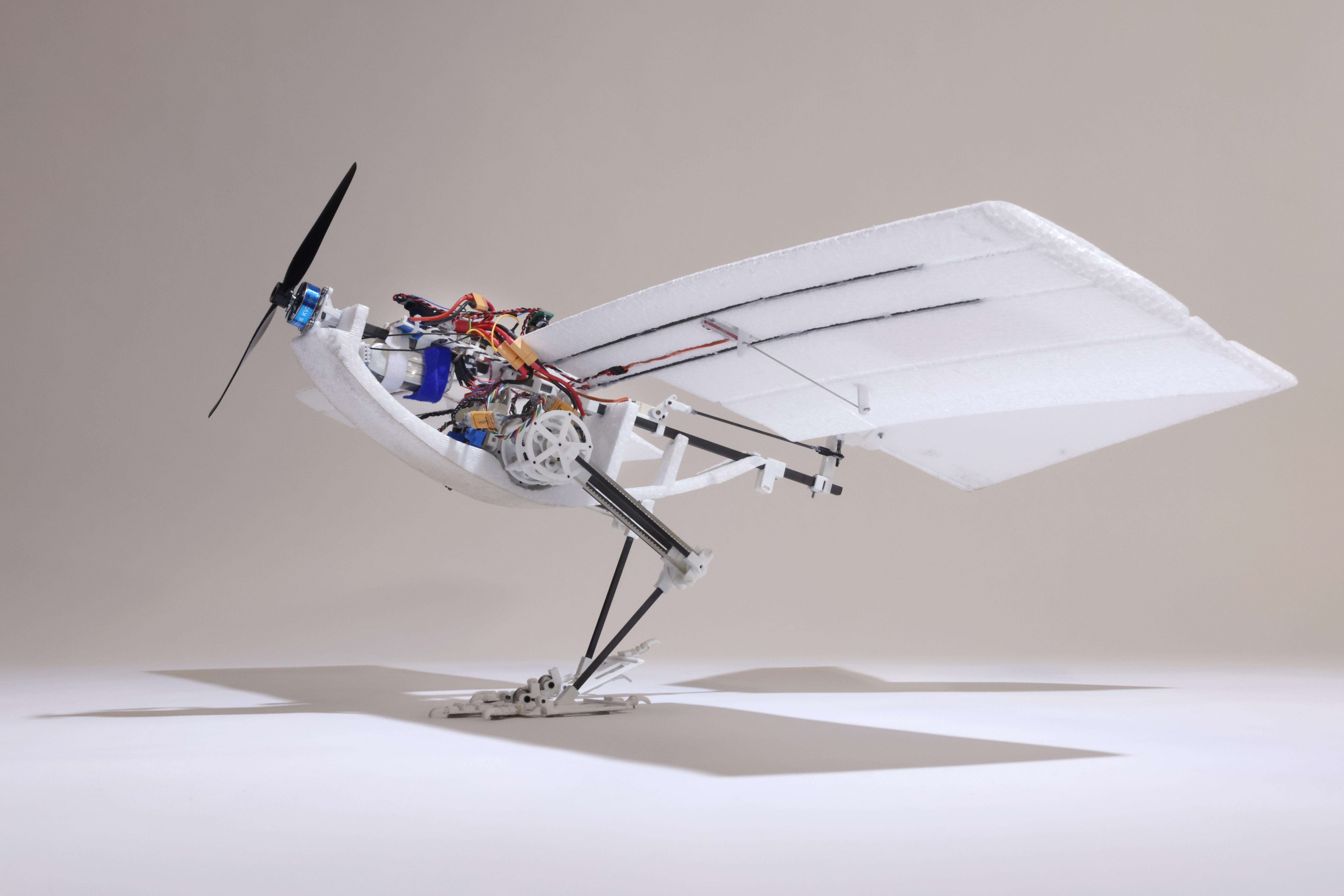
O design do RAVEN visa maximizar a diversidade de andamentos enquanto minimiza a massa. Inspirado nas proporções das pernas das aves (e observações detalhadas de corvos no campus da EPFL), Shin projetou um conjunto de pernas avianas multifuncionais e personalizadas para um drone com asas fixas. Ele utilizou uma combinação de modelos matemáticos, simulações computacionais e iterações experimentais para alcançar um equilíbrio ótimo entre a complexidade das pernas e o peso geral do drone (0,62 kg). A perna resultante mantém os componentes mais pesados próximos ao “corpo”, enquanto uma combinação de molas e motores imita os tendões e músculos potentes das aves. Os pés leves inspirados em aves, compostos por duas estruturas articuladas, utilizam uma junta elástica passiva que suporta posturas diversas para caminhar, saltar e pular.
“Traduzir as pernas e os pés das aves em um sistema robótico leve nos apresentou problemas de design, integração e controle que as aves resolveram de forma elegante ao longo da evolução”, diz Floreano. “Isso nos levou não apenas a criar o drone com asas mais multimodal até hoje, mas também a iluminar a eficiência energética do salto para decolagem tanto em aves quanto em drones.” A pesquisa foi publicada na Nature.
Melhor acesso para entregas ou ajuda em desastres
Robôs anteriores projetados para caminhar eram pesados demais para saltar, enquanto os robôs projetados para saltar não tinham pés adequados para caminhar. O design único do RAVEN permite que ele caminhe, atravesse lacunas no terreno e até pule para uma superfície elevada de 26 centímetros de altura. Os cientistas também experimentaram diferentes modos de iniciação de voo, incluindo decolagem a partir de uma posição em pé ou caindo, e descobriram que saltar para o voo fez o melhor uso da energia cinética (velocidade) e da energia potencial (ganho de altura). Os pesquisadores do LIS se uniram a Auke Ijspeert, do Laboratório de BioRobótica da EPFL, e ao Laboratório de Neuromecânica de Monica Daley, da Universidade da Califórnia, Irvine, para adaptar a biomecânica das aves à locomoção robótica.

Além de elucidar os custos e benefícios de pernas poderosas em aves que frequentemente transitam entre o ar e o solo, os resultados oferecem um design leve para drones com asas que podem se mover em terrenos irregulares e decolar de locais restritos sem intervenção humana. Essas capacidades possibilitam o uso de tais drones em inspeções, mitigação de desastres e entregas em áreas confinadas. A equipe da EPFL já está trabalhando em um design aprimorado e no controle das pernas para facilitar o pouso em uma variedade de ambientes.
“As asas das aves são o equivalente das pernas dianteiras em quadrúpedes terrestres, mas pouco se sabe sobre a coordenação entre pernas e asas nas aves – sem mencionar os drones. Esses resultados representam apenas um primeiro passo para uma melhor compreensão dos princípios de design e controle de animais voadores multimodais, e sua tradução em drones ágeis e energeticamente eficientes”, diz Floreano.