Haptiknit: Uma nova tecnologia vestível

Dispositivos táteis vestíveis, projetados para fornecer feedback baseado no toque, aumentam a imersão em realidade virtual, apoiam esforços de reabilitação e possibilitam comunicação silenciosa. No entanto, a maioria dos dispositivos existentes depende de vibração, pois soluções baseadas em pressão geralmente exigem exoesqueletos pesados ou estruturas rígidas.
Com o objetivo de superar essas limitações, pesquisadores da Engenharia de Stanford apresentaram o Haptiknit—uma manga de malha macia e flexível que fornece feedback tátil realista baseado em pressão. Publicada em 18 de dezembro na Science Robotics, a inovação demonstra que a tecnologia tátil baseada em pressão pode superar a vibração em aplicações específicas, abrindo caminho para uma nova geração de tecnologias hápticas.
O design deles demonstra que a pressão pode ser mais eficaz do que a vibração em algumas aplicações e marca o primeiro passo em direção a uma nova categoria de dispositivos táteis. Ele é muito mais leve, vestível e confortável. / Allison Okamura, Autora principal do estudo e Professora Richard W. Weiland, Universidade de Stanford
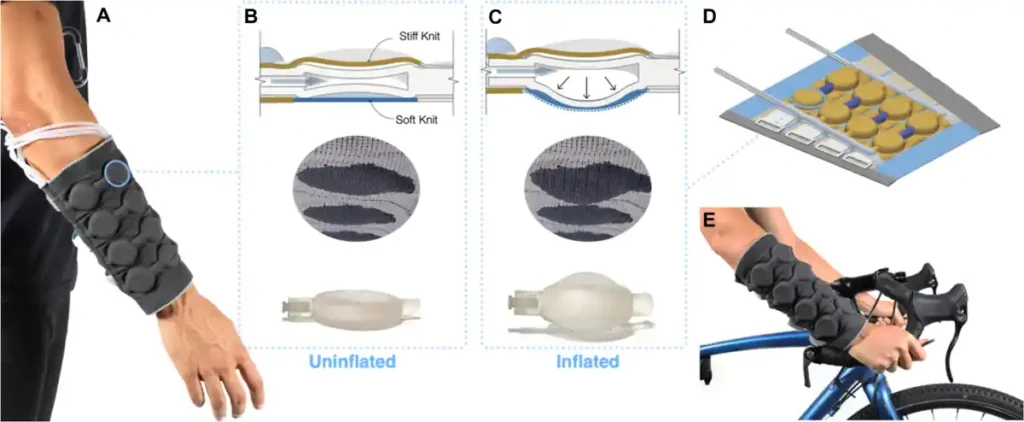
Okamura e sua equipe desenvolveram um sistema pneumático alimentado por bateria com atuadores de pressão—bolsos infláveis compactos que se enchem rapidamente de ar. Para resolver o desafio de fixar esses bolsos contra a pele sem a necessidade de um exoesqueleto volumoso, eles criaram uma solução inovadora.
“Se você colocar ar em um balão próximo à sua pele, mas não ancorá-lo lá, ele vai se expandir em todas as direções. Você vai desperdiçar a maior parte do potencial de inflação.” / Cosima du Pasquier, Autora principal do estudo e Pesquisadora Pós-Doutoral, Universidade de Stanford
Du Pasquier, uma entusiasta de roupas, identificou o tecido de malha como a chave para resolver o desafio. A equipe de pesquisa projetou um tecido especializado que combina rigidez em áreas específicas para posicionar com segurança os atuadores de pressão contra a pele, e flexibilidade em outras partes para garantir conforto e liberdade de movimento.
A equipe fez uma parceria com o MIT Self-Assembly Lab para criar o protótipo do Haptiknit usando uma máquina de tricô. O design acomodou oito atuadores dispostos em duas fileiras. Fabricada principalmente de nylon e algodão, a manga também incorporou fibras termoplásticas nas áreas de apoio dos atuadores. Após o processo de tricô, os pesquisadores aplicaram calor para derreter as fibras termoplásticas, endurecendo essas seções para fornecer a rigidez necessária, mantendo a flexibilidade no restante do tecido.
“Um desafio no campo da robótica suave é como juntar algo duro e algo macio – eles tendem a se descolar. Mas colocar essas fibras no tricô cria uma transição totalmente sem costura de partes duras para partes macias porque é um tecido contínuo”, acrescentou Okamura.
Os pesquisadores avaliaram o protótipo do Haptiknit com 32 participantes e descobriram que os usuários conseguiam identificar com mais precisão a localização dos toques individuais dos atuadores de pressão em comparação com um dispositivo vibracional de disposição similar. Eles também experimentaram variar a velocidade de inflação dos atuadores em sequência para simular a sensação de um movimento contínuo, em vez de toques discretos—ou a sensação desconcertante de uma aranha rastejando no braço. Os participantes relataram que as indentação mais rápidas e sobrepostas imitavam efetivamente a sensação de um movimento suave, em contraste com a vibração.
Em outro teste, os participantes foram desafiados a reconhecer seis emoções—atenção, gratidão, felicidade, relaxamento, amor e tristeza—transmitidas por sinais baseados em pressão. Com base em padrões de toque estabelecidos em estudos anteriores, os participantes identificaram corretamente as emoções em taxas acima do acaso, embora alguma confusão tenha surgido, particularmente entre os gestos para “relaxamento” e “amor”.
No geral, os participantes classificaram as sensações do Haptiknit como igualmente ou mais agradáveis do que as produzidas por vibrações. Eles também acharam o protótipo da manga confortável e fácil de usar, destacando seu potencial para aplicações de longo prazo em diversos ambientes.
“O que foi particularmente interessante foi que havia uma correlação entre o fato de alguém já ter experimentado um dispositivo háptico e como avaliava o conforto da nossa manga. Essencialmente, se já tivessem experimentado outros dispositivos hápticos, eles classificaram nossa manga muito mais positivamente”, acrescentou du Pasquier.
Com dispositivos hápticos mais leves e confortáveis, os pesquisadores visualizam maneiras inovadoras de se comunicar por meio do toque. Du Pasquier sugeriu que o Haptiknit poderia ter aplicações em navegação, comunicação militar e até no treinamento de cães.
Okamura, du Pasquier e sua equipe estão refinando seus padrões de tricô e explorando o desenvolvimento de dispositivos em maior escala, incluindo a possibilidade de um traje completo para experiências imersivas em realidade virtual. Eles também buscam integrar sua tecnologia em dispositivos assistivos projetados para apoiar o movimento e a reabilitação.
Okamura concluiu: “Podemos usar isso para começar a testar como as pessoas realmente interpretam e respondem a esse tipo de informação tátil. Seja para entretenimento, comunicação, treinamento ou assistência física, isso realmente aproxima esses dispositivos vestíveis de algo que as pessoas realmente possam querer usar em seu cotidiano.”
A pesquisa foi publicada na revista Science Robotics.