Robô que muda de forma: O Futuro da Exploração Espacial
Engenheiros da Universidade Estadual da Carolina do Norte apresentaram uma nova geração de robôs que mudam de forma, que podem transformar os campos da exploração espacial e do socorro em desastres. Inspirados pela antiga arte japonesa do origami, essas máquinas combinam a elegância da dobradura de papel com a tecnologia robótica de ponta, oferecendo versatilidade e eficiência.
A equipe, liderada pela Professora Associada Jie Yin do Departamento de Engenharia Mecânica e Aeroespacial, enfrentou um dos desafios mais significativos em robótica. Como Yin explica: “A questão que estamos levantando é como alcançar uma série de formas versáteis com o menor número possível de atuadores acionando a mudança de forma.” A solução encontrada é uma abordagem hierárquica inspirada na natureza, particularmente na estrutura em camadas das fibras musculares humanas.
Yin detalha a abordagem: “Aqui usamos um conceito hierárquico observado na natureza – como as fibras musculares em camadas – mas com cubos de plástico para criar um robô que se transforma.” Este design inovador combina simplicidade com uma versatilidade notável.
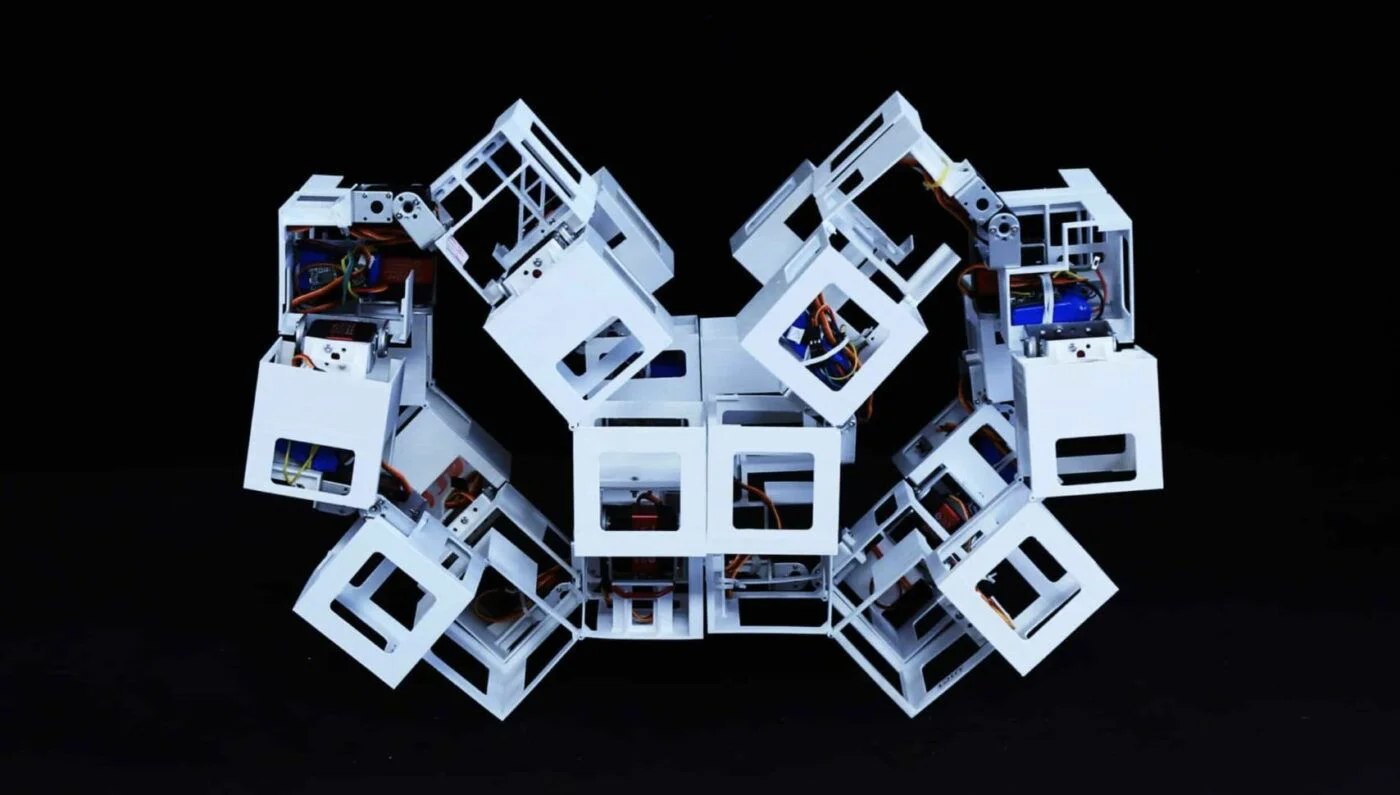
No coração desse design revolucionário está um sistema modular de cubos de plástico conectados por dobradiças. Essas dobradiças servem como articulações, permitindo movimentos e transformações complexas. A chave para a versatilidade do sistema são suas articulações rotacionais, que aumentam significativamente o alcance dos ângulos e configurações possíveis.
Esse design permite que o robô se curve, dobre e reconfigure em várias formas, adaptando-se a diferentes ambientes e tarefas com uma facilidade notável.
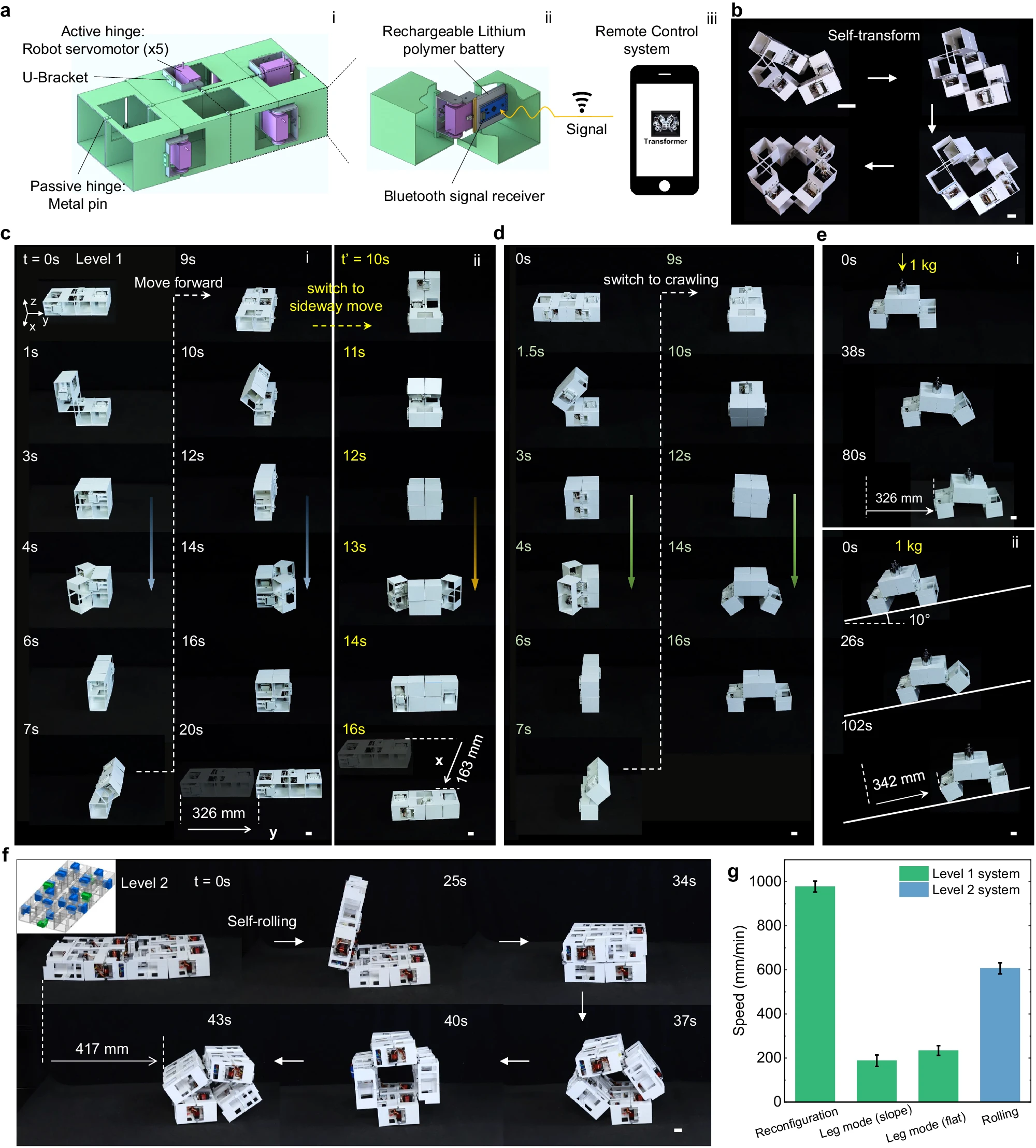
Um dos aspectos mais impressionantes deste novo sistema robótico é sua eficiência. Apesar de sua complexidade, o sistema requer um consumo mínimo de energia para as transformações. Em uma configuração, um robô equipado com 22 motores controlando 36 articulações precisa usar apenas até três motores por vez para uma transformação completa. Isso representa um avanço significativo em eficiência energética em comparação com designs anteriores, que frequentemente exigiam um consumo substancial de energia para operações de mudança de forma.
As capacidades de transformação do robô são igualmente impressionantes. Em testes, a equipe demonstrou que o robô poderia se rearranjar de um cubo compacto para uma estrutura completamente aberta usando apenas dois motores para movimentar 16 de suas articulações. Esse processo levou apenas dois minutos, uma melhoria dramática em relação aos designs anteriores, que exigiam horas para transformações similares.
Yanbin Li, um pesquisador de pós-doutorado da NC State e coautor correspondente do artigo, destaca os objetivos deles: “Queremos criar uma estrutura mais robusta que possa suportar cargas maiores. Se quisermos uma forma de carro, por exemplo, como projetamos a estrutura inicial que pode se transformar em uma forma de carro? Também queremos testar nossas estruturas com aplicações do mundo real, como robôs espaciais.”
As aplicações potenciais para esses robôs que mudam de forma são vastas e variadas. Na exploração espacial, eles poderiam desempenhar múltiplas funções, adaptando-se a diferentes necessidades à medida que surgem. Antonio Di Lallo, um pesquisador de pós-doutorado da NC State e coautor principal do artigo, explica: “Acreditamos que esses robôs podem ser usados como robôs e habitats espaciais configuráveis e implantáveis. É modular, então você pode enviá-lo para o espaço de forma compacta e montá-lo como um abrigo ou habitat, e depois desmontá-lo.”
Em superfícies planetárias, esses robôs poderiam ser rapidamente implantados como abrigos de emergência ou transformados em veículos de transporte de carga. A natureza modular do design até permite a possibilidade de dividir-se em vários robôs menores, cada um capaz de realizar tarefas especializadas. Esse nível de versatilidade poderia reduzir significativamente a quantidade de equipamento necessário para missões espaciais, melhorando a eficiência e reduzindo os custos.
A robustez do design é outra vantagem chave. Apesar de suas capacidades transformadoras, o robô demonstra uma força impressionante. Em sua configuração de vários andares, ele pode suportar até duas vezes e meia seu próprio peso. Quando implantado em formas mais simples, como pontes ou túneis, sua capacidade de carga aumenta para mais de três vezes e meia seu peso. Essa combinação de força e flexibilidade torna o robô adequado para uma ampla gama de aplicações práticas.
A construção desses robôs utiliza tecnologia de impressão 3D, empregando painéis rígidos de plástico ABS para as estruturas dos cubos e materiais flexíveis para as dobradiças. Essa abordagem não apenas simplifica a montagem, mas também permite uma fácil desmontagem e reconfiguração, aumentando a adaptabilidade do robô a diferentes cenários.
O controle do robô é realizado através de servomotores habilitados por Bluetooth e alimentados por baterias recarregáveis, oferecendo um equilíbrio entre controle preciso e eficiência energética. Esse sistema de controle sem fio contribui para a versatilidade do robô, permitindo operação remota em ambientes desafiadores.
À medida que a equipe de pesquisa olha para o futuro, eles estão se concentrando em melhorar ainda mais as capacidades de carga do robô e explorar aplicações no mundo real. O potencial desses robôs na exploração espacial é particularmente empolgante, com possibilidades que vão desde habitats implantáveis até componentes de espaçonaves reconfiguráveis.
No entanto, os pesquisadores enfatizam que, para que esses robôs alcancem seu pleno potencial, a facilidade de uso será crucial. Como destaca a Professora Yin: “Para os usuários, precisa ser fácil de montar e de controlar.” Esse foco na facilidade de uso será essencial para a adoção em larga escala e aplicação prática desses robôs inovadores.
Essa abordagem inovadora à robótica combina princípios da natureza, origami e engenharia avançada, representando um avanço significativo na área. Ao enfrentar desafios chave como eficiência energética, versatilidade e facilidade de uso, esses robôs que mudam de forma abrem novas possibilidades para exploração e resposta a desastres.
À medida que a pesquisa avança, em breve poderemos ver essas máquinas adaptáveis desempenhando papéis cruciais em algumas das empreitadas mais ambiciosas da humanidade, desde a exploração do espaço profundo até a resposta rápida em situações de crise na Terra.
A pesquisa foi publicada na Nature Communications.
Outras ideias para robôs que mudam de forma já foram apresentadas. Um exemplo é o ElectroVoxels, apresentado em 2022. ElectroVoxels são cubos robóticos que podem se reconfigurar usando eletroímãs. Esses cubos não precisam de motores ou propulsores para se mover e podem operar em gravidade zero.