Robô que salta como um gato para explorar asteroides.
Pesquisadores chineses criaram um robô movido por inteligência artificial capaz de saltar pelo terreno irregular e de baixa gravidade dos asteroides, oferecendo uma abordagem inovadora para explorar pequenos corpos celestes.
Inspirados na habilidade natural de um gato de se virar e cair de pé durante uma queda, os pesquisadores do Instituto de Tecnologia de Harbin projetaram um robô capaz de ajustar sua postura no ar utilizando aprendizado por reforço, uma ramificação da inteligência artificial. Em vez de depender de hardware de estabilização volumoso, o robô utiliza um sistema de controle “sem modelo” para coordenar suas quatro pernas, balançando-as em uníssono para manter o equilíbrio.
Essa abordagem inovadora, detalhada no Journal of Astronautics no mês passado, permite que o robô corrija sua inclinação e até mesmo se reoriente para enfrentar uma nova direção enquanto está no ar.
O estudo aborda um desafio significativo nos saltos robóticos em pequenos corpos celestes: ambientes de baixa gravidade. Nessas condições, até mesmo um pequeno desequilíbrio na força das pernas pode causar giros descontrolados, aterrissagens desastrosas ou o robô saltando completamente da superfície, observaram os pesquisadores.

“No ambiente de baixa gravidade desses [pequenos corpos celestes], os robôs passam por longos períodos de queda livre durante cada salto. É essencial utilizar esse tempo para corrigir quaisquer desvios de altitude induzidos pelo salto, garantindo um pouso seguro ou ajustando o ângulo de guinada para modificar sua trajetória futura”, escreveram os pesquisadores.
“Uma plataforma de teste de simulação de microgravidade para robôs quadrúpedes, utilizando tecnologia de suspensão a ar, foi projetada e construída, validando a eficácia dessa estratégia de controle por meio de experimentos com protótipos.”
Pequenos corpos celestes, remanescentes antigos da formação do sistema solar, oferecem pistas vitais sobre suas origens. Esses corpos também são abundantes em recursos valiosos, como platina e outros metais raros, que podem desempenhar um papel crucial no avanço da exploração espacial e das atividades industriais futuras.
Embora agências espaciais da Europa, Japão e Estados Unidos tenham conseguido pousar espaçonaves em asteroides para coletar amostras, nenhuma missão até hoje enviou um rover capaz de realizar exploração prolongada da superfície.
Rovers tradicionais com rodas, como os projetados para a Lua e Marte, enfrentam dificuldades em pequenos corpos celestes devido à sua gravidade extremamente fraca—apenas uma fração da gravidade da Terra. Essa falta de atração gravitacional não fornece tração suficiente para que as rodas funcionem de maneira eficiente.
Para superar essas limitações, cientistas sugeriram o uso de robôs saltadores para futuras missões. No entanto, essa abordagem traz seus próprios desafios.
Cada salto mantém o robô no ar por cerca de 10 segundos ou mais, uma duração onde até mesmo pequenos desequilíbrios na força das pernas podem levar a giros descontrolados ou fazer o robô saltar da superfície e flutuar no espaço.
A equipe de pesquisa de Harbin, localizada na província de Heilongjiang, no nordeste da China, abordou esse problema utilizando aprendizado por reforço—especificamente a otimização de política proximal—para treinar o robô em uma simulação virtual.
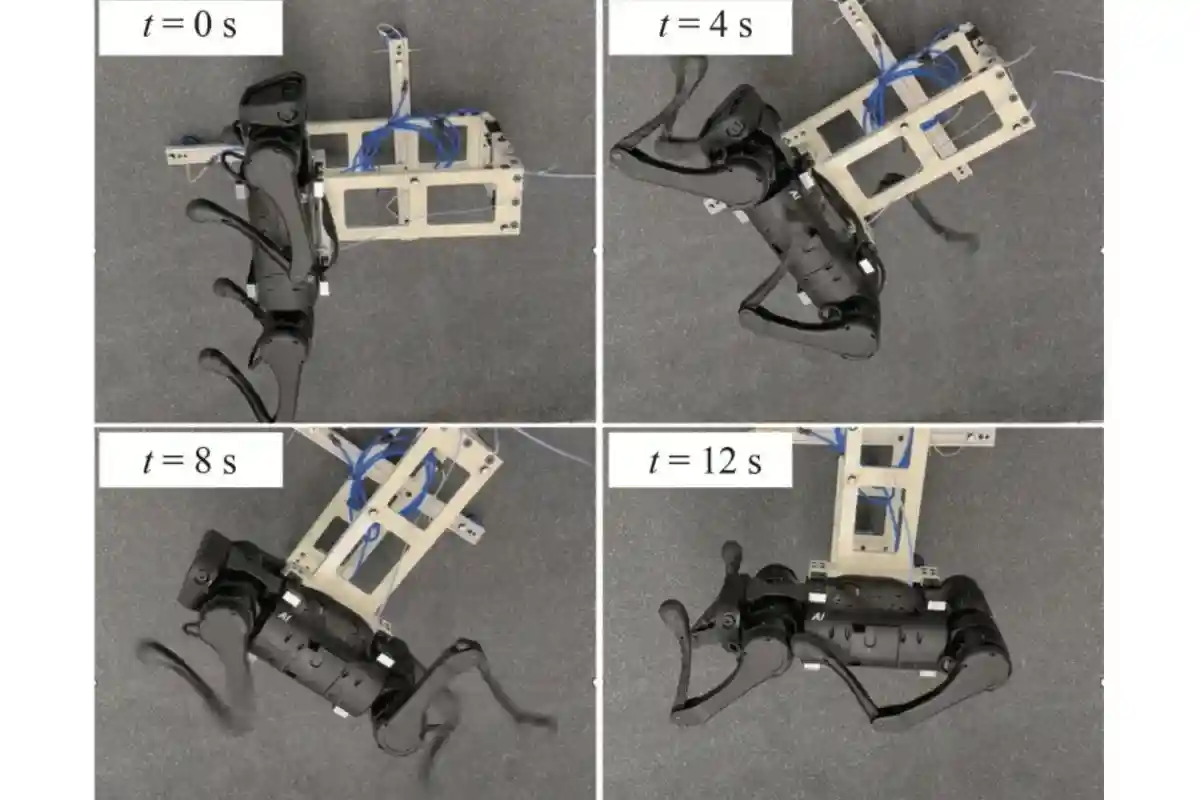
Após sete horas de treinamento, a IA aprimorou seus movimentos por meio de tentativa e erro, aprendendo a realizar pousos estáveis. O sistema demonstrou controle preciso sobre sua orientação, incluindo pitch (inclinação para frente e para trás), roll (inclinação lateral) e yaw (ângulo de rotação), estabilizando-se em segundos.
Por exemplo, quando lançado com uma inclinação acentuada para frente de 140 graus, o robô corrigiu sua postura em apenas oito segundos. Ele também conseguiu girar no ar até 90 graus para enfrentar uma nova direção.
Para testar o sistema, os pesquisadores criaram uma plataforma de simulação de microgravidade utilizando rolamentos a ar para replicar as condições de baixa gravidade dos asteroides. Esse setup permitiu que o robô “flutuasse” em uma superfície quase sem atrito, simulando os desafios do ambiente de um asteroide.

Embora os experimentos tenham sido limitados ao movimento bidimensional, os resultados confirmaram a eficácia do sistema, validando as descobertas da simulação, de acordo com a equipe de pesquisa.
Os pesquisadores também descobriram que o sistema requer um poder de computação mínimo a bordo. Seu design leve e eficiente em termos de energia o torna especialmente adequado para exploração no espaço profundo.
- Veja também: O domínio da inteligência artificial é inevitável?
Olhando para o futuro, o sistema pode ter diversas aplicações, desde a exploração científica até a mineração de asteroides. No entanto, a equipe observou que é necessário mais trabalho para aprimorar a adaptabilidade da IA a diferentes terrenos e ambientes.