Shape-shifting robot: Future of Space Exploration
Engineers at North Carolina State University have unveiled a new generation of shape-shifting robots that could transform the fields of space exploration and disaster relief. Taking inspiration from the ancient Japanese art of origami, these machines combine the elegance of paper folding with cutting-edge robotics technology, offering versatility and efficiency.
The team, led by Associate Professor Jie Yin of the Department of Mechanical and Aerospace Engineering, has tackled one of the most significant challenges in robotics. As Yin explains, “The question we’re asking is how to achieve a number of versatile shapes with the fewest number of actuators powering the shapeshifting.” Their solution lies in a hierarchical approach inspired by nature, particularly the layered structure of human muscle fibers.
Yin elaborates on their approach: “Here we use a hierarchical concept observed in nature – like layered muscle fibers – but with plastic cubes to create a transforming robot.” This innovative design combines simplicity with remarkable versatility.
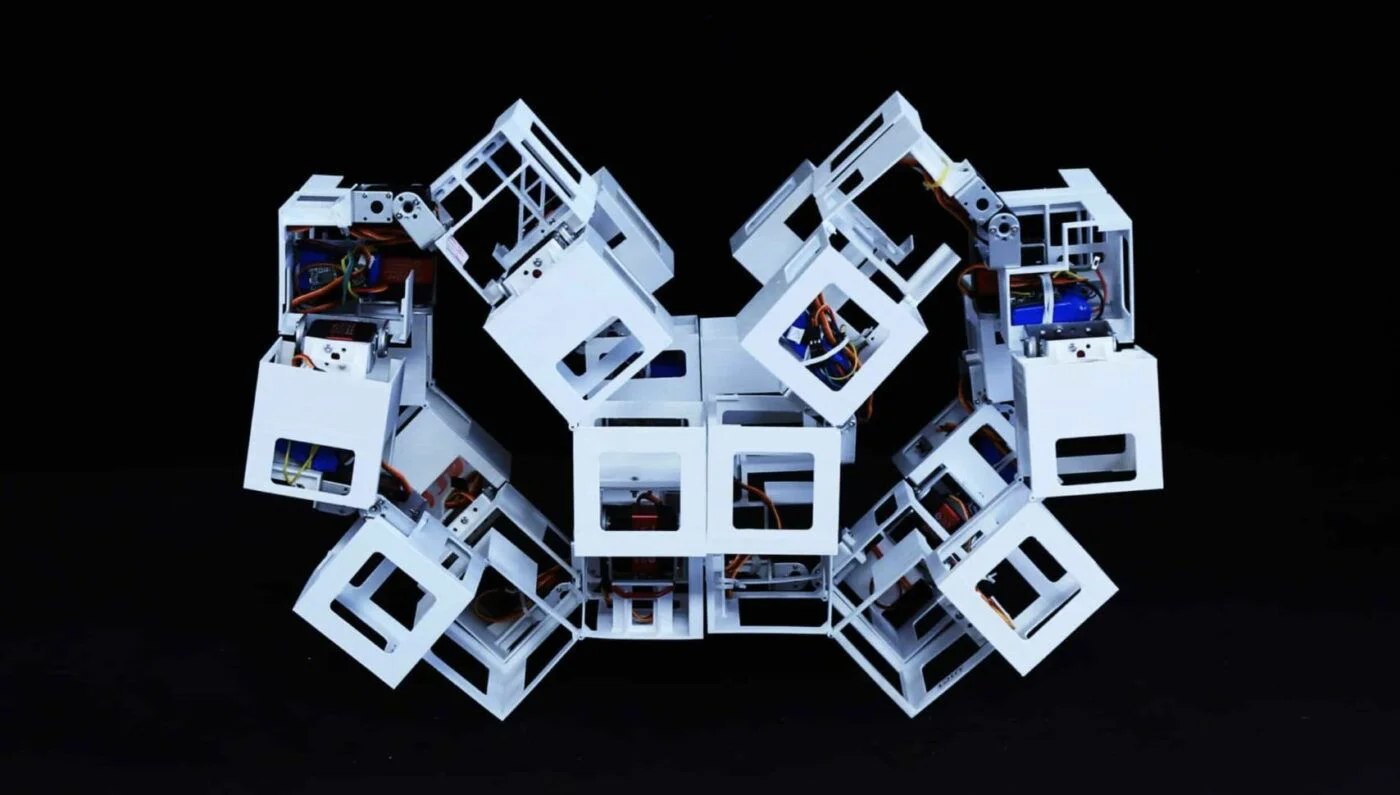
At the heart of this revolutionary design is a modular system of plastic cubes connected by hinges. These hinges serve as joints, allowing for complex movements and transformations. The key to the system’s versatility is its rotational joints, which significantly increase the range of possible angles and configurations.
This design allows the robot to bend, fold, and reshape itself into various forms, adapting to different environments and tasks with remarkable ease.
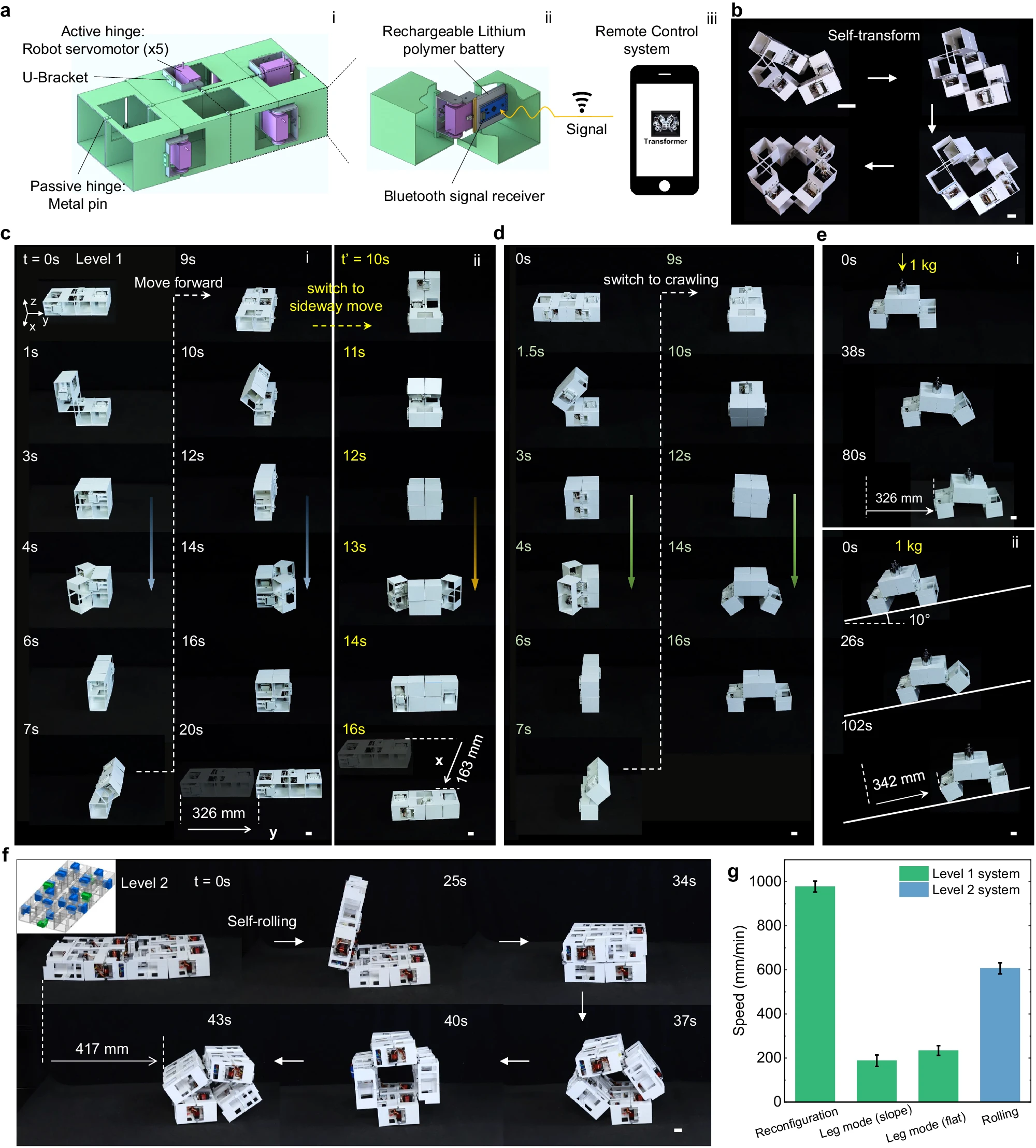
One of the most impressive aspects of this new robotic framework is its efficiency. Despite its complexity, the system requires minimal energy input for transformations. In one configuration, a robot equipped with 22 motors controlling 36 joints only needs to use up to three motors at a time for a complete transformation. This represents a significant leap forward in energy efficiency compared to previous designs, which often required substantial power consumption for shape-shifting operations.
The robot’s transformation capabilities are equally impressive. In tests, the team demonstrated that the robot could rearrange itself from a compact cube into a fully open structure using only two motors to drive 16 of its joints. This process took just two minutes, a dramatic improvement over earlier designs that required hours for similar transformations.
Yanbin Li, an NC State postdoctoral researcher and co-corresponding author of the paper, highlights their goals: “We want to make a more robust structure that can bear larger loads. If we want a car shape, for example, how do we design the first structure that can transform into a car shape? We also want to test our structures with real-world applications like space robots.”
The potential applications for these shape-shifting robots are vast and varied. In space exploration, they could serve multiple functions, adapting to different needs as they arise. Antonio Di Lallo, an NC State postdoctoral researcher and co-first author of the paper, explains: “We think these can be used as deployable, configurable space robots and habitats. It’s modular, so you can send it to space flat and assemble it as a shelter or as a habitat, and then disassemble it.”
On planetary surfaces, these robots could quickly deploy as emergency shelters or transform into cargo-carrying vehicles. The modular nature of the design even allows for the possibility of splitting into multiple smaller robots, each capable of performing specialized tasks. This level of versatility could significantly reduce the amount of equipment needed for space missions, improving efficiency and reducing costs.
The robustness of the design is another key advantage. Despite its transformative capabilities, the robot demonstrates impressive strength. In its multistory configuration, it can support up to two and a half times its own weight. When deployed in simpler forms like bridges or tunnels, its load-bearing capacity increases to over three and a half times its weight. This combination of strength and flexibility makes the robot suitable for a wide range of practical applications.
The construction of these robots relies on 3D printing technology, using rigid ABS plastic panels for the cube structures and flexible materials for the hinges. This approach not only simplifies assembly but also allows for easy disassembly and reconfiguration, enhancing the robot’s adaptability to different scenarios.
Control of the robot is achieved through Bluetooth-enabled servomotors powered by rechargeable batteries, providing a balance of precise control and energy efficiency. This wireless control system adds to the robot’s versatility, allowing for remote operation in challenging environments.
As the research team looks to the future, they are focusing on further improving the robot’s load-bearing capabilities and exploring real-world applications. The potential for these robots in space exploration is particularly exciting, with possibilities ranging from deployable habitats to reconfigurable spacecraft components.
However, the researchers emphasize that for these robots to reach their full potential, ease of use will be crucial. As Professor Yin notes, “For users, it needs to be easy to assemble and to control.” This focus on user-friendliness will be essential for the widespread adoption and practical application of these innovative robots.
This innovative approach to robotics combines principles from nature, origami and advanced engineering, representing a significant advance in the field. By tackling key challenges such as energy efficiency, versatility and ease of use, these shape-shifting robots open up new possibilities for exploration and disaster response.
As research continues, we could soon see these adaptable machines playing crucial roles in some of humanity’s most ambitious endeavors, from deep space exploration to rapid response in crisis situations on Earth.
The research was published in Nature Communications.
Other ideas for shape-shifting robots have already been presented. One example is ElectroVoxels, presented in 2022. ElectroVoxels are robotic cubes that can reconfigure themselves using electromagnets. These cubes don’t need motors or thrusters to move and can operate in zero gravity.