PulseRide: The wheelchair with artificial intelligence
Staying physically active is not so simple for wheelchair users. Manual wheelchairs require constant strength and, over time, can cause pain and injury. On the other hand, motorized wheelchairs make it easier to get around, but reduce the physical effort required to almost zero. The result is a daily dilemma between movement and health, in which none of the traditional options fully meet the body’s needs.
It is in this scenario that PulseRide emerges, a motorized robotic assistance system that dynamically adjusts the level of effort required, based on real-time physiological data.
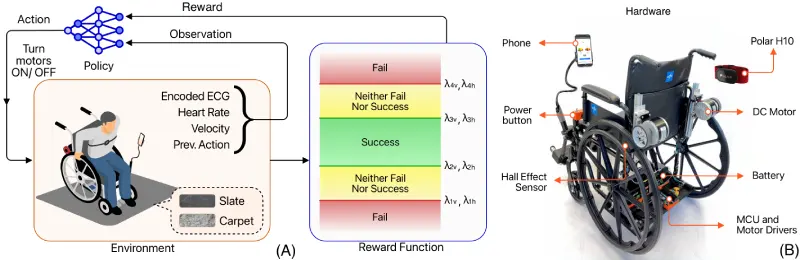
Developed by researchers at the University of Tennessee, PulseRide stands out by integrating heart rate and electrocardiogram sensors into the Human-in-the-Loop Reinforcement Learning system. This approach allows the chair to “learn” the ideal level of effort for each user, adapting to the environment and individual physical condition.
Unlike conventional wheelchairs—or even motorized models with fixed assistance—PulseRide balances mobility with healthy physical activity. The system prevents both overexertion and total idleness, keeping users within a range of moderate cardiovascular activity.
The basic structure of PulseRide is based on a manual wheelchair adapted with two 250W DC motors and speed sensors. The centerpiece, however, is the set of AI algorithms. They receive continuous heart rate and electrocardiogram data from sensors such as the Polar H10, and also analyze the speed of the chair.
Before use, each person undergoes a pre-training stage in which they push the chair at different levels of effort. With this data, the system builds a personalized “green zone” — the ideal activity range for that user. During everyday use, the chair responds in real time, activating or deactivating the motor to keep the user in that target zone.
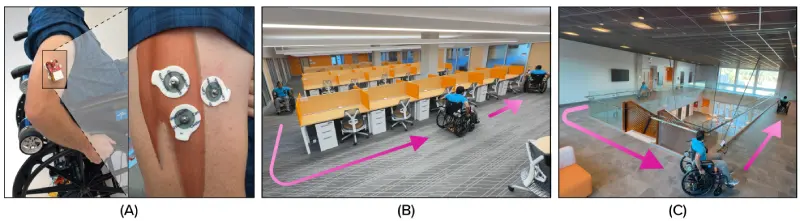
In tests with 10 volunteers on surfaces such as carpet and smooth flooring, PulseRide’s results were impressive:
- Up to 71.7% more time in the moderate activity zone compared to using a manual chair.
- Up to 41.86% reduction in muscle contractions, indicating less physical effort and lower risk of injury.
- Delay in the onset of muscle fatigue, proven by electromyography signal analysis.
These data show that PulseRide not only improves mobility but also promotes physical health in a measurable way—something that conventional assistance systems are still unable to offer.
Another striking feature of PulseRide is its ability to adapt to differences between users. Each participant had their moderate heart rate zone adjusted individually. Even on more demanding surfaces, such as carpets, the system was able to keep most volunteers in the ideal effort range — something that conventional chairs were unable to replicate.
The secret behind PulseRide’s efficiency lies in reinforced learning with human feedback. During initial training sessions, participants receive commands such as “slow down” or “speed up,” guiding the algorithm through various physiological states. This allows the system to learn to recognize patterns and make more assertive decisions.
This strategy, combined with the use of neural networks to interpret ECG signals, gives PulseRide the ability to respond fluidly and sensitively to user variations — an advance over systems that use fixed rules or predefined levels of assistance.
Although initial testing was conducted with participants without disabilities, PulseRide’s proposal is ambitious: to bring this technology to real wheelchair users, with the promise of improving not only their mobility, but also their physical health and quality of life.
The total cost of the attachable hardware, including the manual wheelchair, is less than US$500. The system points to an accessible future in which robotics and artificial intelligence are no longer laboratory luxuries but part of everyday life for people with motor disabilities.
Reference: Zahid, A., Poudel, B., Scott, D., Scott, J., Crouter, S., Li, W., & Swaminathan, S. (2025). PulseRide: A Robotic Wheelchair for Personalized Exertion Control with Human-in-the-Loop Reinforcement Learning. Available at: https://arxiv.org/abs/2506.05056