Nova ferramenta permite que qualquer pessoa treine um robô.
Jennifer Chu | MIT News
Ensinar novas habilidades a um robô costumava exigir conhecimento em programação. Mas uma nova geração de robôs poderá aprender com praticamente qualquer pessoa.
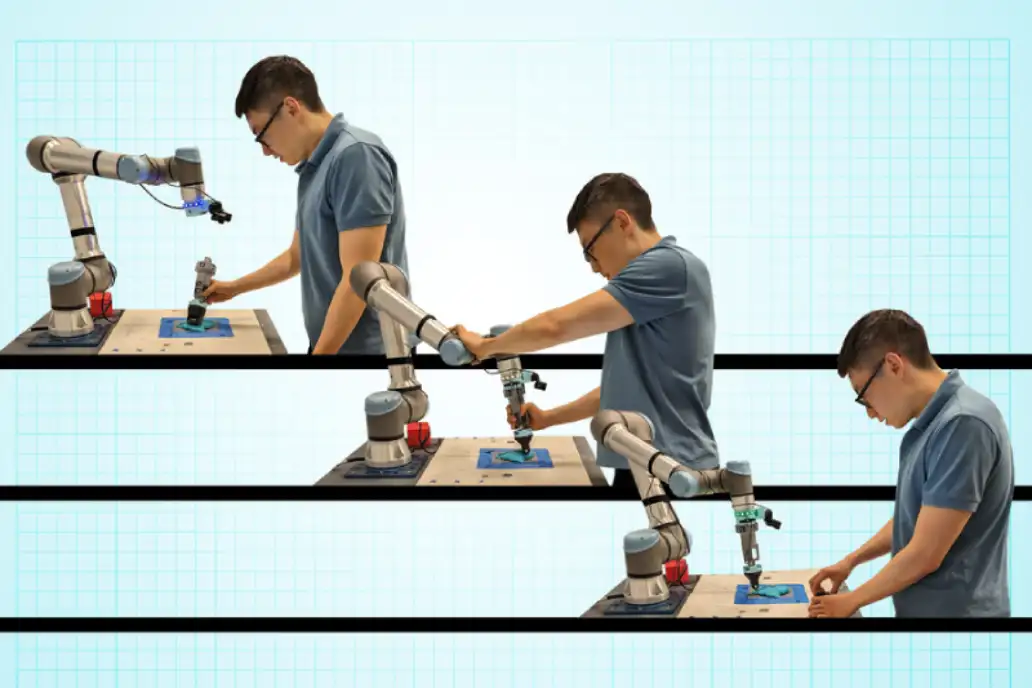
Engenheiros estão projetando ajudantes robóticos que podem “aprender por demonstração”. Essa estratégia de treinamento mais natural permite que uma pessoa conduza um robô durante uma tarefa, geralmente de três maneiras: via controle remoto, como operar um joystick para movimentar o robô à distância; movendo fisicamente o robô pelos movimentos; ou realizando a tarefa ela mesma enquanto o robô observa e imita.
Robôs que aprendem na prática normalmente treinam utilizando apenas uma dessas três formas de demonstração. Mas engenheiros do MIT desenvolveram agora uma interface de treinamento três-em-um que permite ao robô aprender uma tarefa por qualquer um desses três métodos. A interface é um dispositivo portátil equipado com sensores que pode ser acoplado a diversos braços robóticos colaborativos comuns. A pessoa pode usar esse acessório para ensinar o robô a executar uma tarefa controlando-o remotamente, manipulando-o fisicamente ou demonstrando a tarefa — seja qual for o estilo que ela preferir ou que melhor se adapte à tarefa.
A equipe do MIT testou a nova ferramenta, que eles chamam de “interface de demonstração versátil”, em um braço robótico colaborativo padrão. Voluntários com experiência em manufatura usaram a interface para realizar duas tarefas manuais que são comumente executadas em linhas de produção.
Os pesquisadores afirmam que a nova interface oferece maior flexibilidade no treinamento, o que pode ampliar o tipo de usuários e “professores” que interagem com os robôs. Ela também pode permitir que os robôs aprendam um conjunto mais amplo de habilidades. Por exemplo, uma pessoa poderia treinar remotamente um robô para manusear substâncias tóxicas, enquanto, mais adiante na linha de produção, outra pessoa poderia mover fisicamente o robô nos movimentos de embalar um produto, e no final da linha, alguém poderia usar o acessório para desenhar o logotipo da empresa enquanto o robô observa e aprende a fazer o mesmo.
“Estamos tentando criar companheiros de equipe altamente inteligentes e habilidosos que possam trabalhar efetivamente com humanos para realizar tarefas complexas”, diz Mike Hagenow, pesquisador de pós-doutorado do MIT no Departamento de Aeronáutica e Astronáutica. “Acreditamos que ferramentas de demonstração flexíveis podem ajudar muito além do chão de fábrica, em outros domínios onde esperamos ver maior adoção de robôs, como em ambientes domésticos ou de cuidado.”
Hagenow apresentará um artigo detalhando a nova interface na conferência IEEE Intelligent Robots and Systems (IROS), em outubro. Os coautores do MIT do artigo são Dimosthenis Kontogiorgos, pesquisador de pós-doutorado no Laboratório de Ciência da Computação e Inteligência Artificial do MIT (CSAIL); Yanwei Wang, doutor em engenharia elétrica e ciência da computação, turma de 2025; e Julie Shah, professora do MIT e chefe do Departamento de Aeronáutica e Astronáutica.
Treinando juntos
O grupo de Shah no MIT projeta robôs que podem trabalhar ao lado dos humanos no ambiente de trabalho, em hospitais e em casa. Um foco principal de sua pesquisa é desenvolver sistemas que permitam às pessoas ensinar novas tarefas ou habilidades aos robôs “no trabalho”, por assim dizer. Esses sistemas ajudariam, por exemplo, um trabalhador da linha de produção a ajustar rápida e naturalmente as manobras de um robô para melhorar sua tarefa no momento, sem precisar interromper o trabalho para reprogramar o software do robô do zero — uma habilidade que o trabalhador pode não possuir.
O novo trabalho da equipe se baseia em uma estratégia emergente no aprendizado de robôs chamada “aprendizado por demonstração” (learning from demonstration, ou LfD), na qual os robôs são projetados para serem treinados de formas mais naturais e intuitivas. Ao revisar a literatura sobre LfD, Hagenow e Shah identificaram que os métodos de treinamento desenvolvidos até agora se enquadram geralmente em três categorias principais: teleoperação, treinamento cinestésico e ensino natural.

Um método de treinamento pode funcionar melhor do que os outros dois para uma pessoa ou tarefa específica. Shah e Hagenow se perguntaram se seria possível criar uma ferramenta que combinasse os três métodos para permitir que um robô aprendesse mais tarefas com mais pessoas.
“Se conseguíssemos reunir essas três formas diferentes que alguém pode querer interagir com um robô, isso poderia trazer benefícios para diferentes tarefas e para diferentes pessoas”, diz Hagenow.
Tarefas em foco
Com esse objetivo em mente, a equipe desenvolveu uma nova interface de demonstração versátil (VDI). A interface é um acessório portátil que pode ser acoplado ao braço de um robô colaborativo típico. O acessório está equipado com uma câmera e marcadores que rastreiam a posição e os movimentos da ferramenta ao longo do tempo, além de sensores de força para medir a pressão aplicada durante uma tarefa.
Quando a interface está conectada ao robô, todo o robô pode ser controlado remotamente, e a câmera da interface grava os movimentos do robô, que podem ser usados como dados de treinamento para o robô aprender a tarefa sozinho. De forma semelhante, uma pessoa pode mover fisicamente o robô durante uma tarefa com a interface acoplada. A VDI também pode ser destacada e segurada fisicamente por uma pessoa para realizar a tarefa desejada. A câmera grava os movimentos da VDI, que o robô pode usar para imitar a tarefa quando o acessório for recolocado.
Para testar a usabilidade do acessório, a equipe levou a interface, junto com um braço robótico colaborativo, a um centro local de inovação onde especialistas em manufatura aprendem e testam tecnologias que podem melhorar os processos nas fábricas. Os pesquisadores organizaram um experimento no qual pediram a voluntários do centro que usassem o robô e os três métodos de treinamento da interface para completar duas tarefas comuns de manufatura: montagem por pressão (press-fitting) e moldagem.
Na montagem por pressão, o usuário treinou o robô para encaixar pinos em furos, similar a muitas tarefas de fixação. Na moldagem, um voluntário treinou o robô para empurrar e espalhar uma substância maleável parecida com massa de borracha ao redor da superfície de um eixo central, semelhante a algumas tarefas de termomoldagem.
Para cada uma das duas tarefas, os voluntários foram convidados a usar cada um dos três métodos de treinamento, começando pela teleoperação do robô via joystick, depois a manipulação cinestésica do robô, e finalmente, destacando o acessório do robô para “executar naturalmente” a tarefa, enquanto o robô gravava a força e os movimentos do acessório.
Os pesquisadores descobriram que, de modo geral, os voluntários preferiram o método natural em relação à teleoperação e ao treinamento cinestésico. Os usuários, todos especialistas em manufatura, mencionaram cenários em que cada método poderia ter vantagens sobre os outros. A teleoperação, por exemplo, pode ser preferível para treinar um robô a lidar com substâncias perigosas ou tóxicas. O treinamento cinestésico poderia ajudar os trabalhadores a ajustar o posicionamento de um robô responsável por mover pacotes pesados. E o ensino natural poderia ser vantajoso para demonstrar tarefas que envolvem manobras delicadas e precisas.
“Imaginamos usar nossa interface de demonstração em ambientes de manufatura flexíveis, onde um robô possa auxiliar em uma variedade de tarefas que se beneficiam de tipos específicos de demonstração”, diz Hagenow, que planeja aprimorar o design do acessório com base no feedback dos usuários e usará o novo design para testar o aprendizado do robô. “Encaramos este estudo como uma demonstração de como uma maior flexibilidade em robôs colaborativos pode ser alcançada por meio de interfaces que ampliam as formas pelas quais os usuários finais interagem com os robôs durante o ensino.”
Este trabalho foi apoiado, em parte, pelo Programa de Bolsas de Pós-Doutorado para Excelência em Engenharia do MIT e pela Bolsa de Pesquisa de Pós-Doutorado da Fundação Wallenberg.
Reimpresso com permissão do MIT News.