Robot that jumps like a cat to explore asteroids

Chinese researchers have created an AI-driven robot capable of jumping across the uneven, low-gravity terrain of asteroids, offering a groundbreaking approach to exploring small celestial bodies.
Inspired by a cat’s natural ability to twist and land on its paws during a fall, researchers from the Harbin Institute of Technology designed a robot capable of adjusting its posture mid-air using reinforcement learning, a branch of artificial intelligence. Instead of relying on bulky stabilisation hardware, the robot employs a “model-free” control system to coordinate its four legs, swinging them in unison to maintain balance.
This innovative approach, detailed in the Journal of Astronautics last month, enables the robot to correct its tilt and even reorient itself to face a new direction while airborne.
The study addresses a significant challenge in robotic jumping on small celestial bodies: low-gravity environments. In such conditions, even a slight imbalance in leg force can cause uncontrolled spinning, crash landings, or the robot bouncing entirely off the surface, the researchers noted.

“In the low-gravity environment of these [small celestial] bodies, robots undergo extended periods of free fall during each jump. It is essential to utilise this time to correct any altitude deviations induced by the jump, ensuring a safe landing or adjusting the yaw angle to modify their future trajectory,” the team wrote.
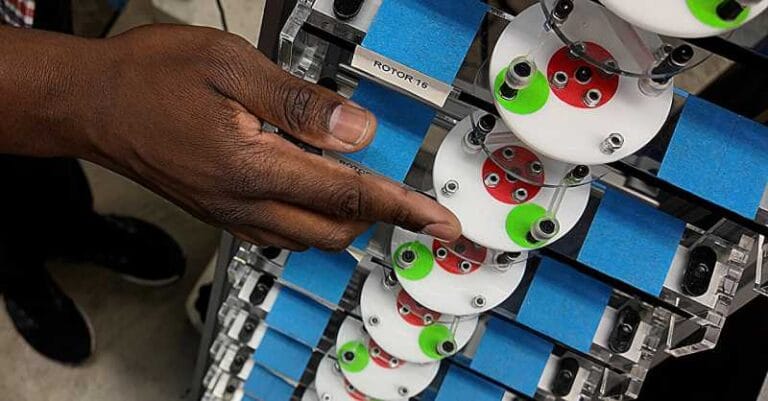
“A microgravity simulation test platform for quadrupedal robots employing air suspension technology has been designed and constructed, validating the effectiveness of this control strategy through prototype experiments.”
Small celestial bodies, ancient remnants from the solar system’s formation, offer vital clues about its origins. These bodies are also abundant in valuable resources, such as platinum and other rare metals, which could play a crucial role in advancing future space exploration and industrial activities.
While space agencies in Europe, Japan, and the United States have successfully landed spacecraft on asteroids to collect samples, no mission to date has deployed a rover capable of conducting extended surface exploration.
Traditional wheeled rovers, like those designed for the Moon and Mars, struggle on small celestial bodies due to their extremely weak gravity—just a fraction of Earth’s. This lack of gravitational pull provides insufficient traction for wheels to function efficiently.
To overcome these limitations, scientists have suggested deploying jumping robots for future missions. However, this approach brings its own challenges.
Each jump keeps the robot airborne for around 10 seconds or longer, a duration where even slight imbalances in leg force can lead to uncontrolled spinning or cause the robot to bounce off the surface and drift into space.
The research team from Harbin, located in China’s northeastern Heilongjiang province, tackled this problem by using reinforcement learning—specifically proximal policy optimization—to train the robot in a virtual simulation.
Over seven hours of training, the AI refined its movements through trial and error, learning to achieve stable landings. The system demonstrated precise control over its orientation, including pitch (forward-backward tilt), roll (side-to-side tilt), and yaw (rotational angle), stabilizing within seconds.
For example, when launched with a steep forward tilt of 140 degrees, the robot corrected itself in just eight seconds. It also managed to rotate mid-air by up to 90 degrees to face a new direction.
To test the system, the researchers created a microgravity simulation platform using air bearings to replicate the low-gravity conditions of asteroids. This setup allowed the robot to “float” on a nearly frictionless surface, simulating the challenges of an asteroid’s environment.

Although the experiments were limited to two-dimensional motion, the results confirmed the system’s effectiveness, validating the findings from the simulation, according to the research team.
The researchers also discovered that the system requires minimal on-board computational power. Its lightweight, energy-efficient design makes it especially suitable for deep-space exploration.
- See also: Is AI dominance inevitable?
Looking to the future, the system could have diverse applications, ranging from scientific exploration to asteroid mining. However, the team noted that additional work is necessary to enhance the AI’s adaptability to different terrains and environments.